
dinsdag 26 juni 2012
Planning
Robotica
Op 6 juni 2012 ben ik naar de robovision in Veldhoven geweest. Dit was een roboticabeurs waar alles stond dat met robots te maken heeft. Hieronder een aantal foto's om ook mee te kunnen genieten.













Op de beurs heb ik de volgende vragen beantwoordt:

VLS
VLS gemaakt van de ophanging van de Thrust motor. Vervolgens heb ik hierin de onbekenden berekend. Hierna heb ik de N-, D-, en M- lijnen getekend.




Stroomschema
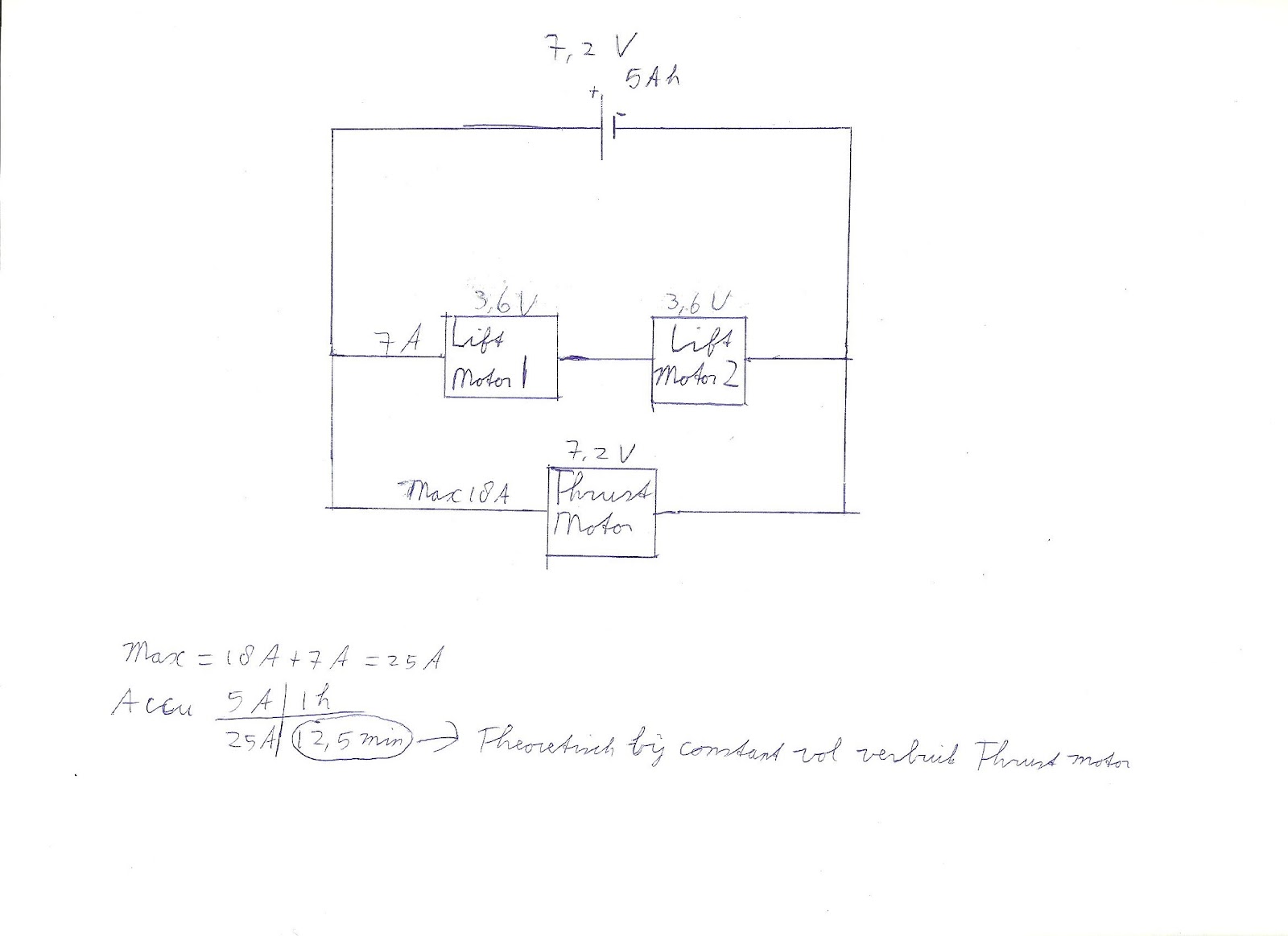
Onderstaand is het elektrische schema van de liftmotoren en de thrust motor.
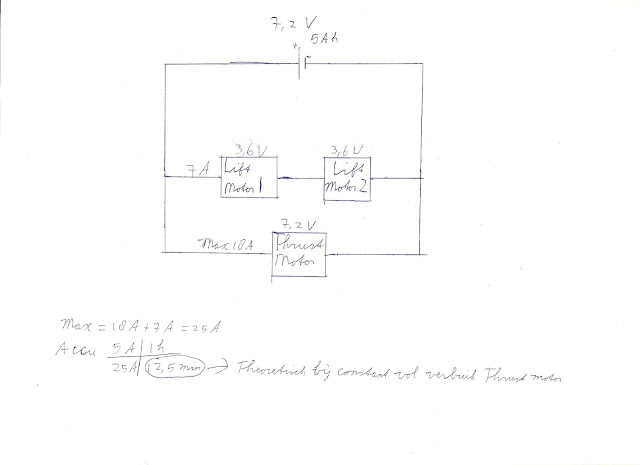 Deze 25 A geldt alleen als de thrust motor vol vermogen levert, dus vol gas. Dit is in de praktijk echter niet steeds het geval, zeker niet als het op behendigheid aan komt om de boeien te detecteren. Daarom zal in de praktijk de accu langer dan 12.5 minuten mee gaan.
Deze 25 A geldt alleen als de thrust motor vol vermogen levert, dus vol gas. Dit is in de praktijk echter niet steeds het geval, zeker niet als het op behendigheid aan komt om de boeien te detecteren. Daarom zal in de praktijk de accu langer dan 12.5 minuten mee gaan.
We hebben dit in de praktijk getest en het schema werkt.
We hebben dit in de praktijk getest en het schema werkt.
Boutberekening

Een berekening gemaakt voor de bevestiging van de Thrustmotor. Hierbij ben ik uitgegaan van 1kilogram stuwkracht wat ongeveer overeenkomt met 10 Newton.
De uitkomst was een middellijn van 0.03 mm2. Omdat deze bouten niet bestaan hebben we er voor gekozen om met de kleinste boutjes die wij hadden te werken. Dit zijn M3 boutjes met een middellijn van 5.03 mm2.
zondag 24 juni 2012
Bevestiging liftmotor
Ik heb de bevestigingssteun van de liftmotor getekend in SolidWorks. Vervolgens heb ik hier een maattekening van gemaakt en heb ik het gemaakt in de werkplaats.




Bodemplaten
Van de twee bodemplaten en de verbindingsstukken heb ik eerst een maattekening gemaakt. Vervolgens ben ik deze gaan maken en assembleren.
Dekplaat

Bodemplaat
 Verbindingsstuk
Verbindingsstuk

Dekplaat

Bodemplaat


zaterdag 23 juni 2012
Marges systeem lift
Ik heb gedefinieerde marges opgesteld voor het systeem lift.
|
Motor
|
Stuwkracht
|
7 kg
|
+/- 2 kg
|
|
|
Spanning
|
7.2 V
|
+/- 0,4
|
|
|
Stroom
|
10 A max
|
+/- 5 A
|
|
|
Toerental (onbelast)
|
10000
|
+/- 2000
|
|
|
Vermogen
|
72 W
|
0
|
|
|
Gewicht
|
200 g
|
+50 g -199 g
|
|
Propellor
|
Bladen
|
2
|
+1 -0
|
|
|
Cm-grootte
|
20 x 15 cm
|
+/- 3 x +/-
5 cm
|
|
Of
turbine
|
Buitendiameter
|
7 cm
|
+/- 2
|
|
|
Gewicht
|
50 g
|
+/- 5
|
|
|
Diameter gat
|
5 cm
|
+/- 2
|
|
Skirt
|
Binnenafmetingen
|
60 x 80 cm
|
0
|
|
|
Buitenafmetingen
|
70 x 90 cm
|
+/- 5 cm
|
|
|
Hoogte
|
5 cm
|
+/- 2 cm
|
|
Accu
|
Lifttijd
|
15 minuten
|
+ 15 -2
|
|
|
Ah
|
7 Ah
|
+3 Ah - 0,5 Ah
|
Sub- systemen Lift
Voor het systeem lift van de hovercraft heb ik verschillende subsystemen opgesteld.
 Hierin heb ik ook al de verschillende componenten weergegeven.
Hierin heb ik ook al de verschillende componenten weergegeven.

Functieboom mosselbevoedselaar

Proof of Concept projectweek
In de eerste week van dit blok heb ik samen met een 2e jaars werktuigbouwkunde student en een ED&I collega een Proof of Concept van een hovercraft gemaakt. We hebben hierbij gewerkt volgens het V-model. Dit houdt in dat we de hovercraft hebben opgedeeld in (sub-)systemen. Vervolgens hebben we deze (sub-)systemen gemaakt en apart uitgetest. Daarna hebben we de verschillende (sub-)systemen bij elkaar gevoegd en stond ons Proof of Concept.
Het resultaat was een goed werkende hovercraft.
 Om dit Proof of Concept te presenteren hebben we een poster gemaakt. Hierin is ook duidelijk te zien dat we volgens het V-model hebben gewerkt.
Om dit Proof of Concept te presenteren hebben we een poster gemaakt. Hierin is ook duidelijk te zien dat we volgens het V-model hebben gewerkt.

Het resultaat was een goed werkende hovercraft.


woensdag 13 juni 2012
Liftmotor
De motoren die we gaan gebruiken voor de liftfunctie van de hovercraft zijn binnengekomen. Hieronder wat specificaties van deze motoren.
Om de propeller aan de motor te bevestigen moest er een verbindingsstukje gemaakt worden. Dit heb ik eerst uitgetekend in SolidWorks. Vervolgens heb ik hier een maattekening van gemaakt en heb ik het onderdeel gedraaid.




|
Spanning
|
7.2 Volt
|
|
Stroom
|
9 Ampére
|
|
Gewicht motor
|
162 gram
|
|
Gewicht motor + propeller
|
232 Gram
|
Om de propeller aan de motor te bevestigen moest er een verbindingsstukje gemaakt worden. Dit heb ik eerst uitgetekend in SolidWorks. Vervolgens heb ik hier een maattekening van gemaakt en heb ik het onderdeel gedraaid.


Het resultaat was de motor met daaraan de propeller bevestigd.



donderdag 7 juni 2012
Maattekening


Onder de les productdocumentatie moesten we een maattekening van een gegeven SolidWorks model maken (bovenste tekening). Vervolgens heb ik de tekening van een collega nagekeken en deze collega heeft feedback gegeven op mijn tekening (2e tekening).

Ik heb vervolgens mijn maattekening nog een beetje aangepast (bovenstaande tekening).
dinsdag 5 juni 2012
Propeller lift


Bovenstaand is een SolidWorks tekening van de propeller die we gaan gebruiken voor de liftfunctie van de hovercraft.
donderdag 31 mei 2012
Maattekening

Berekeningen wrijving op hovercraft

woensdag 30 mei 2012
Monotekening


Solderen voor Verbindingstechnieken

Brushless motoren
Onderstaand is een blok informatie over borstelloze motoren. Hierin is de werking beschreven en het voordeel van een brushless motor ten opzichte van een motor mét koolborstels. Deze info is handig voor het kiezen van de juiste motor voor onze hovercraft.
Een brushless of borstelloze motor is een motor welke zonder koolborstels werkt. De wikkelingen zitten in het huis, en de magneten zitten op de ronddraaiende as gemonteerd. (Kan ook andersom, maar dat wordt alleen in vliegtuigen gebruikt en wordt dan een "buitenloper" genoemd)
Omdat zo'n motor dus geen koolborstels en geen collector heeft, moet de motor aangestuurd worden door een speciale regelaar, die er voor zorgt dat spoelen in de motor (velden) precies op het juiste moment stroom krijgen, zodat de magneten van de rotor op het goede moment aangetrokken of afgestoten worden.
Een van de grootste voordelen van een borstelloze motor is dat er vrijwel geen slijtage of veroudering optreedt. Een motor met koolborstels loopt iedere keer dat je hem gebruikt, een klein stukje in prestatie terug. Hij loopt dus alleen maximaal als de borstels en de collector als nieuw zijn!
Een borstelloze motor heeft dit niet, zoals hij nu loopt, loopt hij in principe na 500 keer rijden nog net zo. Je hoeft dus geen koolborstels te vervangen, geen collector af te draaien, geen draaibank te hebben om je motoren in goede conditie te houden. Alleen maar af en toe schoonmaken en de lagers olin.
Een brushless of borstelloze motor is een motor welke zonder koolborstels werkt. De wikkelingen zitten in het huis, en de magneten zitten op de ronddraaiende as gemonteerd. (Kan ook andersom, maar dat wordt alleen in vliegtuigen gebruikt en wordt dan een "buitenloper" genoemd)
Omdat zo'n motor dus geen koolborstels en geen collector heeft, moet de motor aangestuurd worden door een speciale regelaar, die er voor zorgt dat spoelen in de motor (velden) precies op het juiste moment stroom krijgen, zodat de magneten van de rotor op het goede moment aangetrokken of afgestoten worden.
Een van de grootste voordelen van een borstelloze motor is dat er vrijwel geen slijtage of veroudering optreedt. Een motor met koolborstels loopt iedere keer dat je hem gebruikt, een klein stukje in prestatie terug. Hij loopt dus alleen maximaal als de borstels en de collector als nieuw zijn!
Een borstelloze motor heeft dit niet, zoals hij nu loopt, loopt hij in principe na 500 keer rijden nog net zo. Je hoeft dus geen koolborstels te vervangen, geen collector af te draaien, geen draaibank te hebben om je motoren in goede conditie te houden. Alleen maar af en toe schoonmaken en de lagers olin.
Bovendien is de efficiency van dit soort motoren beter, hij loopt dus langer op een accu lading dan een motor met koolborstels met een vergelijkbare prestatie
Zoals gezegd wordt een borstelloze motor op een speciale manier aangestuurd, waarbij de regelaar de 3 spoelen precies op de juiste manier en frequentie aan moet sturen zodat ze de magneet van de rotor op het juiste moment aantrekken of aanstoten, zodat de rotor draait. Hoe meer toeren de motor maakt, hoe sneller de regelaar de spoelen moet aansturen. De regelaar moet dus op elk moment "weten" in welke positie de rotor staat t.o.v. de spoelen.
(PK Model Racing, Dordrecht)
dinsdag 22 mei 2012


Abonneren op:
Reacties (Atom)